![QLAQ2206[1]](https://childexo.onmason.com/files/2022/07/QLAQ22061-scaled-e1658862175776-1170x250.jpg "QLAQ2206[1]")
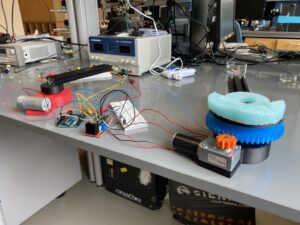
This is the final build of our exoskeleton arm. The impaired arm (right side) is motorized and the unimpaired arm (left side) is just sensorized. There are divots in the bar so that forearm rests, handles, etc. can be placed easily, without the need to redesign the exoskeleton. The person will put their arms in the respective locations and will be strapped in. Once the arm is secure the person can then move there unimpaired arm. When the unimpaired arm moves, the sensors will trigger the motor to move, causing the impaired arm to mirror the movements of the unimpaired arm. The movement that this build can do is only elbow flexion and extension. In future iterations, wrist pronation and supination can be added.
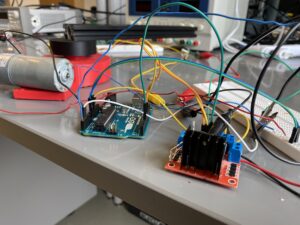
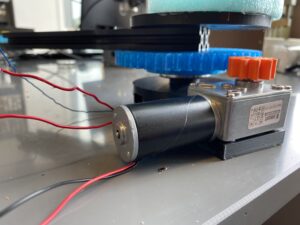
Other Images of the Product:
Recent Comments